Simulation
PhD Research Overview: Fast Gear Contact Simulation
Overview of doctoral research at KU Leuven LMSD (2018 dissertation) on model order reduction for dynamic flexible multibody simulations of mechanical systems dominated by moving contact, with applications in gear dynamics, bearings and drivetrain simulation.
Links & Resources
Research Context
This PhD was carried out at KU Leuven's Mecha(tro)nic System Dynamics (LMSD) research group; the 2018 dissertation, Model Reduction of Contact Problems in Flexible Multibody Dynamics, is publicly available and linked on this page. The work sat at the intersection of computational mechanics, drivetrain engineering, and numerical methods.
In one sentence: the goal was to make dynamic contact simulations fast enough to be useful.
The Problem
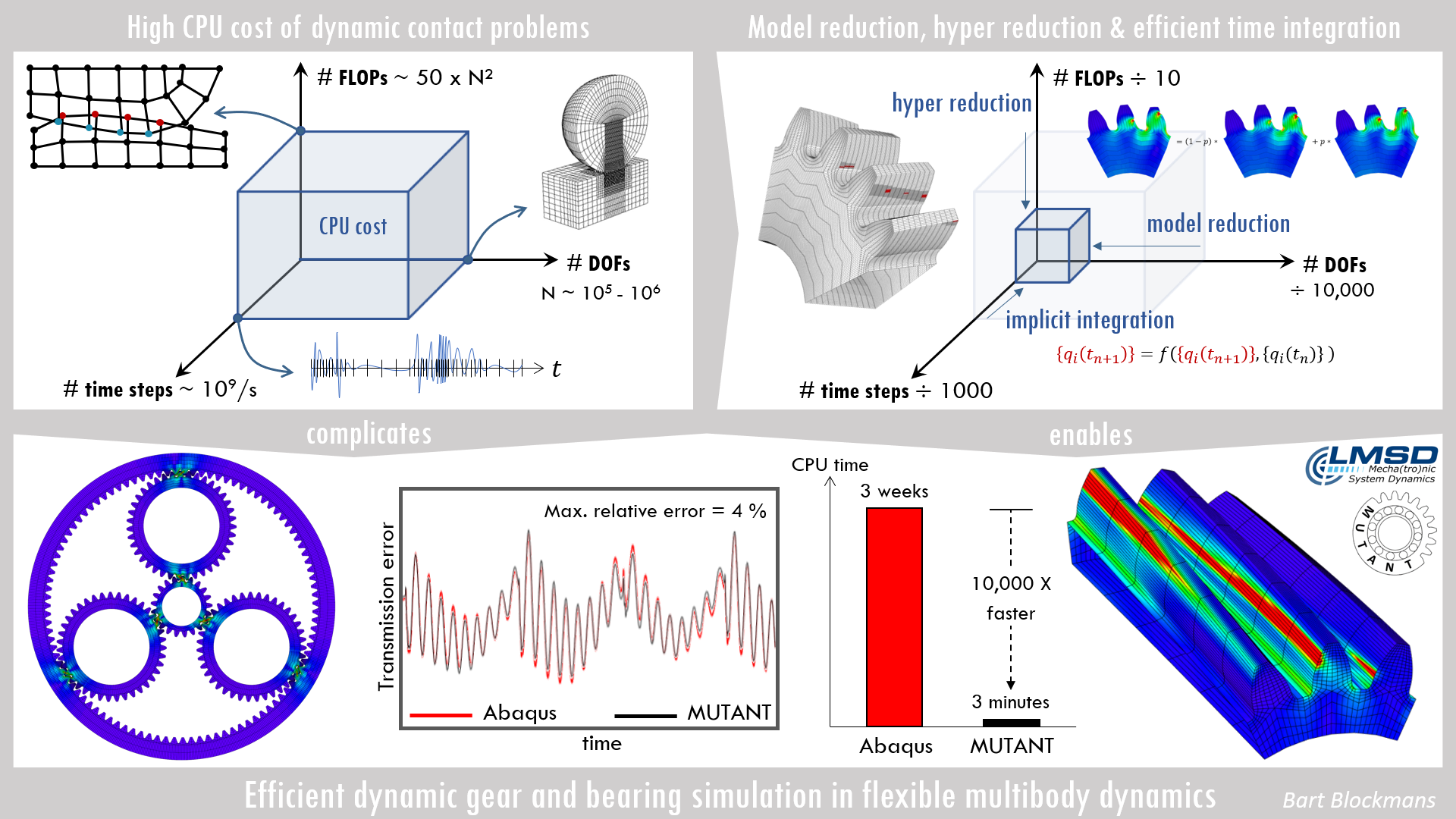
Predicting transmission error, contact forces, stress fields and vibration excitation in geared drivetrains with finite element fidelity is computationally expensive for three reasons simultaneously. FE models introduce large numbers of degrees of freedom. Dynamic contact requires small time steps to resolve the fast contact dynamics accurately. And nonlinear contact force evaluation is expensive, especially when the contact zone moves across a finely meshed surface.
These three bottlenecks compound: reducing the model size does not help if contact force evaluation still scales with the original mesh. Reducing time step size does not help if the model is too large to integrate efficiently.
Research Threads
The PhD addressed these bottlenecks sequentially. First, a model order reduction method based on interpolated contact shapes captured the local tooth deformation under moving gear contact with a small number of generalized coordinates, reducing the size of the FE problem. Second, numerical integration schemes were adapted to the structure of the resulting reduced-order models, enabling larger and more efficient time steps. Third, hyperreduction techniques — in particular the Discrete Empirical Interpolation Method — were explored to reduce the cost of evaluating the nonlinear contact forces in the reduced model.
The combined framework reduced the computational cost of dynamic FE-based gear contact simulation by several orders of magnitude. Each reduction step preserves the first-principles character of the finite element model; none replaces physics with black-box approximations.
Legacy
The methods developed in this work form the technical foundation of the MUTANT toolbox, which remains under active development at KU Leuven LMSD. Several subsequent simulations in this portfolio — gearbox dynamics, planetary gear sets, bearing creep, e-motor NVH — build directly on techniques originating in this research.
The core question the PhD tried to answer remains relevant: how much physics does a simulation need to retain before it becomes predictive, and how much can be removed before it becomes fast enough to be practical?
Related work