Portfolio
Simulations
Filtered by engineering domain or method.
36 simulations
MTB Suspension Load Simulation
A forward-dynamic 9-DOF mountain bike model with unilateral tyre contact and circle-to-curve contact detection, built to determine realistic design loads on components like the rear hub across technical trail terrain.
View full simulationF1 Suspension and Lap Time Simulation at Spa
A 17-DOF F1 vehicle model with full 3D suspension kinematics and drivetrain coupling, used for minimum lap time simulation at Spa-Francorchamps with 40,000 optimization variables across 2000 track segments.
View full simulationPorsche 6-Stroke Engine Dynamics
Parametric multibody model of Porsche's patented 6-stroke planetary engine, coupling single-zone thermodynamics with an 8-DOF drivetrain model to optimize power density, torsional vibration and higher-order inertia balancing across RPM and throttle.
View full simulationOlympic Weightlifting Video Analyzer
A video analysis system for Olympic weightlifting that estimates ground reaction forces, barbell forces and mechanical power output from standard video footage, combining AI pose estimation with a flexible multibody barbell model and state-input estimation.
View full simulationE-Motor NVH via Hyperreduction
The Discrete Empirical Interpolation Method applied to laminated e-motor stacks reduces nonlinear frictional contact force evaluations by nearly two orders of magnitude, enabling NVH analysis of laminated electric motor designs in under 20 seconds.
View full simulationMcLaren MP4/4 Gearbox Dynamics and Fatigue
Senna's 1988 Monaco qualifying lap resimulated with the full McLaren MP4/4 6-speed sequential gearbox modelled using MUTANT, computing gear transmission error, dynamic stress histories, and remaining useful lifetime through rainflow counting and Miner's rule.
View full simulationCable Winch Gear Dynamics
Dynamic transmission error and stress distributions of historic cable-winch gears from the Beringen coal mines, simulated using model reduction that separates gear body analysis from contact analysis to handle symmetry-breaking cut-outs.
View full simulationWeightlifting Force Estimation with Motion Magnification
A motion magnification technique for objects undergoing large rigid-body motion amplifies sub-pixel elastic barbell deformations, extending the video-based force estimation system to lower training weights where barbell flex is invisible to the naked eye.
View full simulationBearing Creep in Electric Vehicle Drivetrains
A reduced-order bearing contact model predicts slow rotational creep of bearing outer rings in EV drivetrains, reducing simulation time from days to minutes while capturing the counterintuitive torque-creep relationship driven by nonlinear stick-slip mechanics.
View full simulationTemporal Convolutional Networks for BMX Dynamics
Temporal Convolutional Networks trained on 1000 simulated BMX downhill runs demonstrate that CNNs can learn vehicle dynamics with high accuracy — and illustrate where learned models break down when pushed beyond their training distribution.
View full simulationAI-Based Dynamic Cycling Power Model
Three cycling power models — static Monod-Sherrer, dynamic Skiba, and an AI-based variant — are compared on a 20 km virtual time trial, showing how a data-driven model trained on personal training logs outperforms heuristic two-parameter approaches for pacing optimization.
View full simulationImage-to-CdA Cyclist Aerodynamics
A pipeline that takes a single photograph of a cyclist and returns an aerodynamic drag estimate in under 10 minutes, combining AI-based 3D human reconstruction with GPU-accelerated Lattice Boltzmann CFD.
View full simulation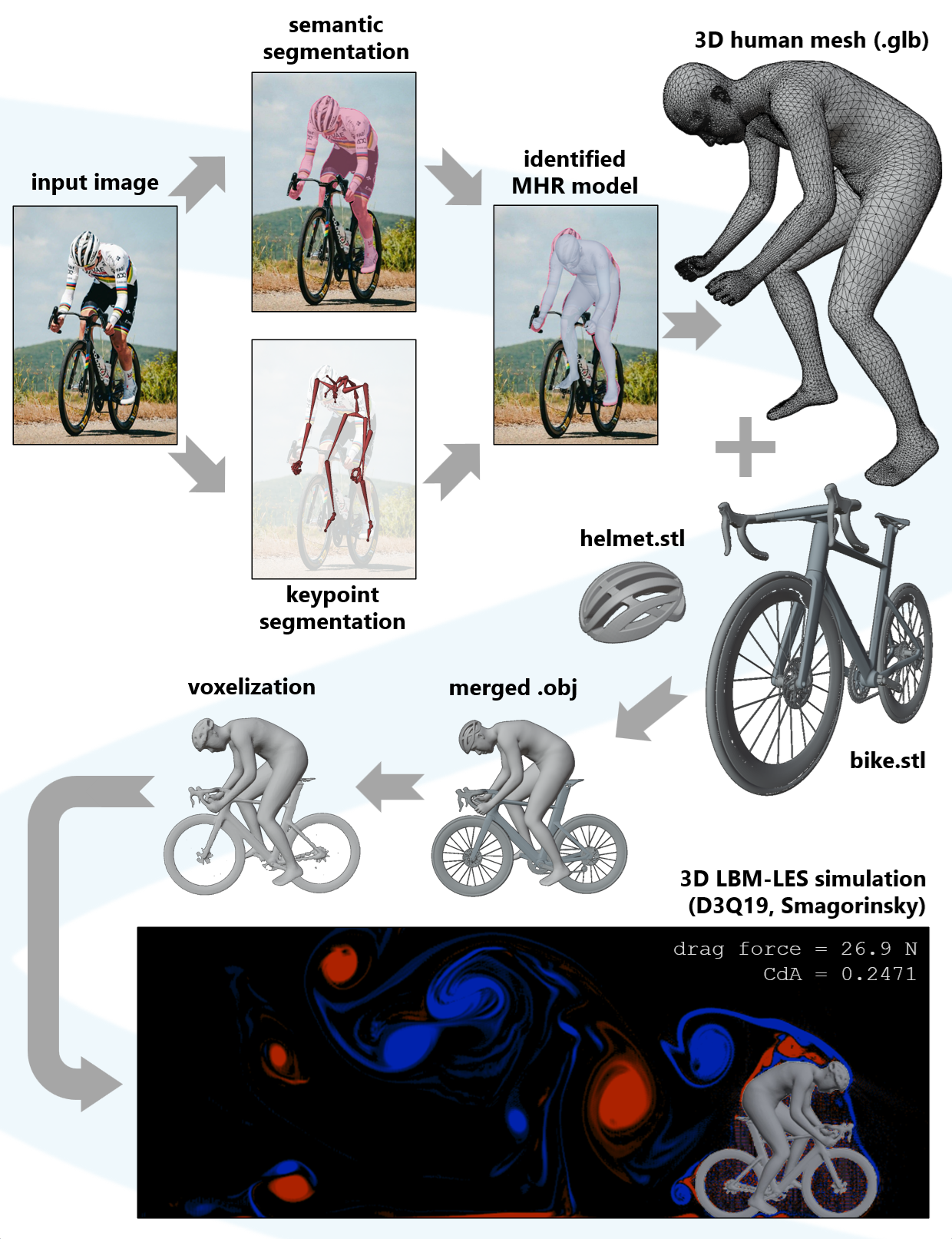
F1 2026 vs 2025 Lap Time Comparison
Lap time simulation comparing the 2025 and 2026 Formula 1 regulations on the Melbourne circuit, capturing the effect of lighter mass, reduced downforce, higher e-motor power, and new energy-flow constraints on race pace and driving style.
View full simulationMinimum Lap Time Simulation: F1 at Monaco
A minimum lap time simulator for Formula 1, implemented in Python and validated against Monaco Grand Prix qualifying data, demonstrating the core vehicle dynamics pipeline from trajectory optimization to GG-diagram interpretation.
View full simulationGeared CVT Dynamics
Dynamic simulation of RatioZero's geared continuously variable transmission, based on Pavilcu's planetary gear patent, showing how the transmission ratio varies with linkage offset and how planet gear count affects the speed range and variation of the output.
View full simulationHelicopter Rotor Aerodynamics
Efficient modelling of unsteady aerodynamic loads on a helicopter rotor for multibody simulation, combining blade-element theory with vortex wake methods and validated against wind-tunnel and flight-test data across multiple flight conditions.
View full simulationCol de la Madeleine Descent Optimization
Minimum time descent simulation of the Col de la Madeleine on a road bike, extended with rolling dynamics, aerodynamic tuck as a control variable, and an energy expenditure constraint enabling Pareto-efficient speed-recovery trade-off analysis.
View full simulationMUTANT Toolbox for Transmission Simulation
Overview of the MUTANT (Multibody Transient Analysis of Transmissions) toolbox developed at KU Leuven LMSD — a multi-fidelity framework for gear, bearing and drivetrain simulation that balances first-principles accuracy with the computational speed needed for practical engineering use.
View full simulation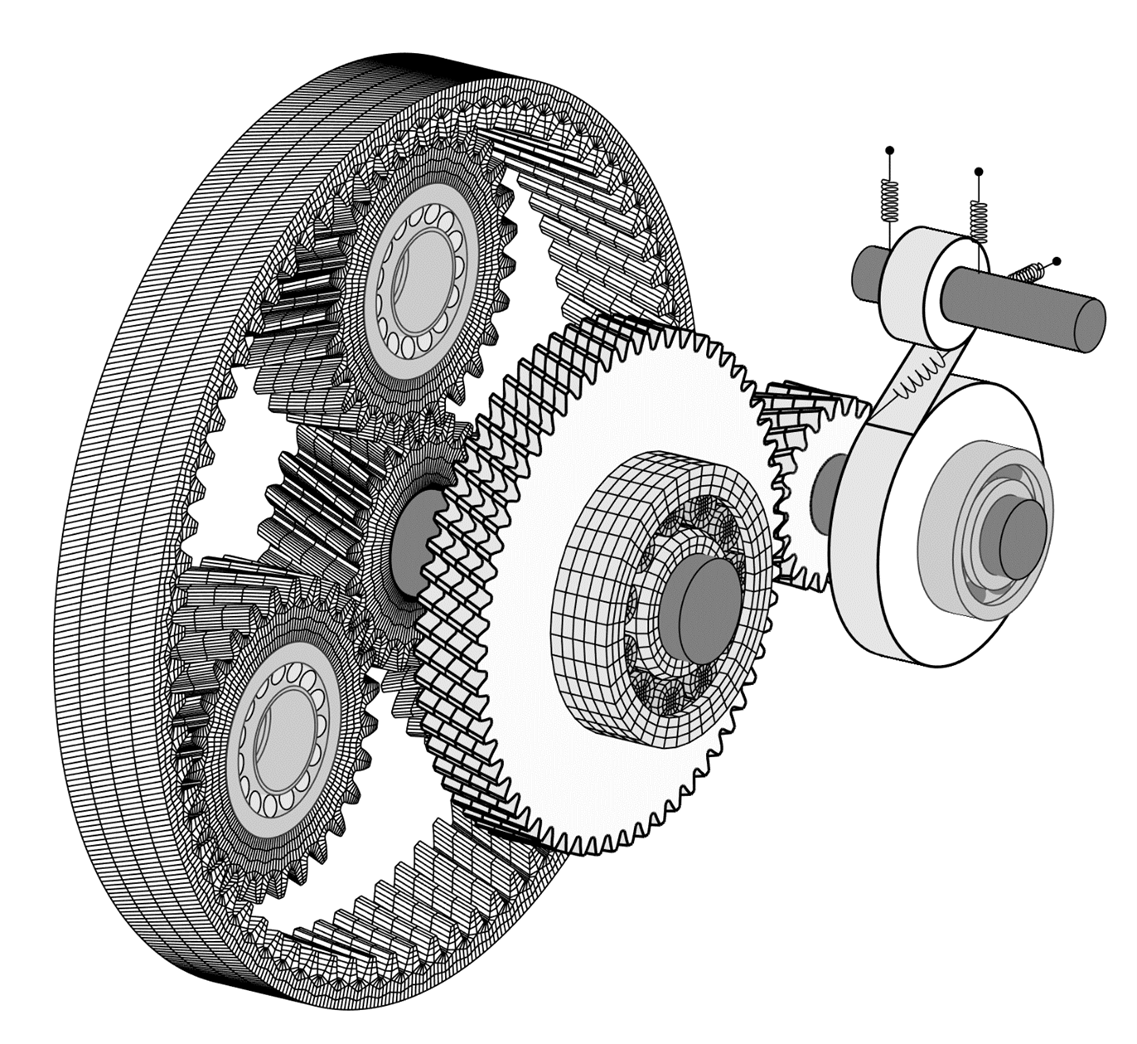
PhD Research Overview: Fast Gear Contact Simulation
Overview of doctoral research at KU Leuven LMSD (2018 dissertation) on model order reduction for dynamic flexible multibody simulations of mechanical systems dominated by moving contact, with applications in gear dynamics, bearings and drivetrain simulation.
View full simulation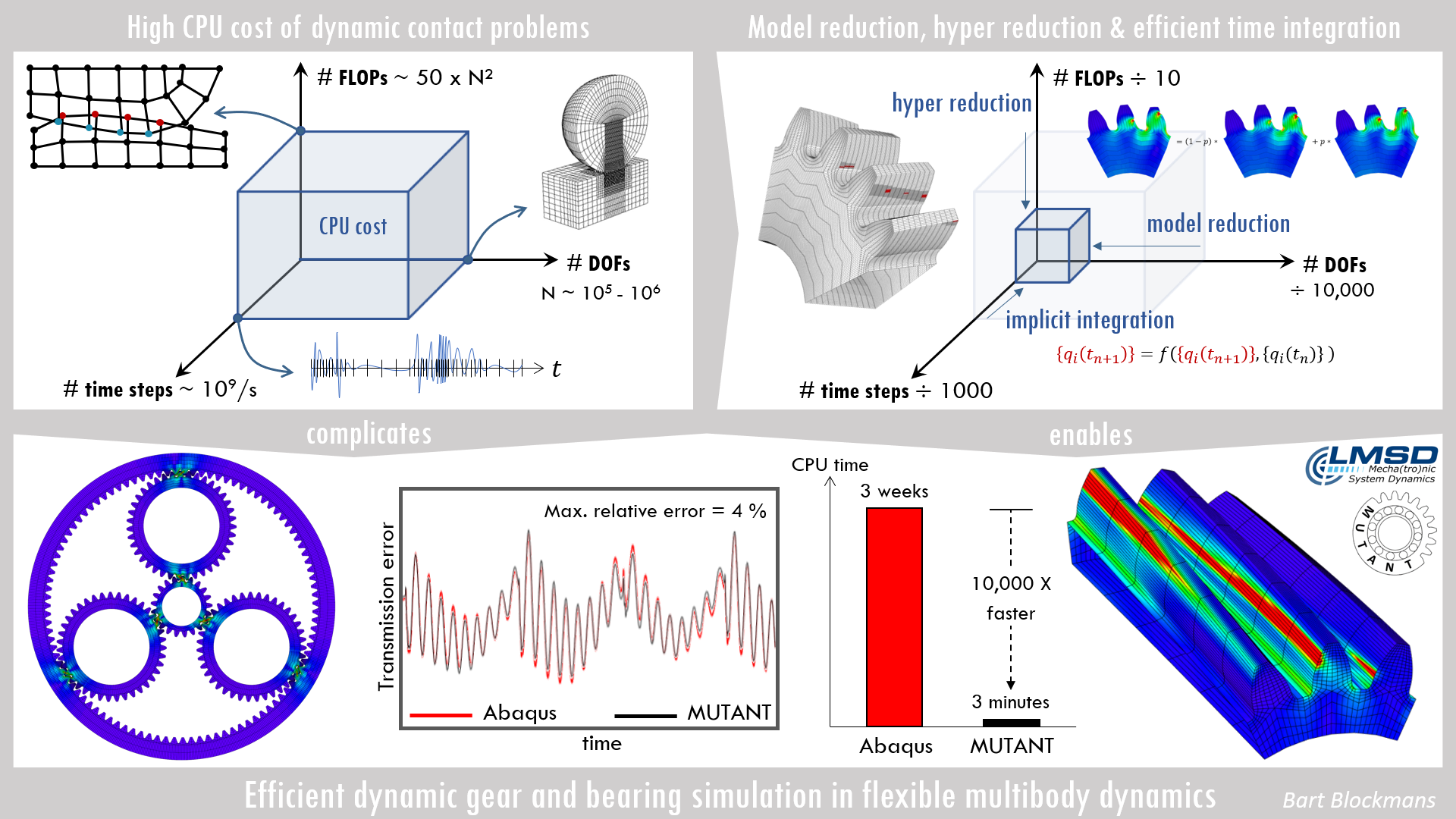
Planetary Gearbox for Wind Turbines
Extension of the interpolated contact shapes approach to planetary gear sets, validated on a helical wind turbine gearbox at 360 kNm carrier torque, achieving nearly two orders of magnitude speedup over CMS reference models while retaining accurate transmission error and tooth stress prediction.
View full simulationPraxis Hinged Transmission Simulation
Dynamic simulation of the Praxis 4-speed hinged chained gearbox, computing drivetrain loads and power losses through all four gear ratios as the transmission shifts under load.
View full simulationTour de Romandie Prologue Optimization
Minimum lap time simulation of the 2024 Tour de Romandie prologue in Saint-Imier, comparing the optimal trajectory against a center-line baseline and demonstrating how a cyclist's energy reservoir couples all states across the lap.
View full simulationStarship Launch Trajectory and Control
A two-phase trajectory optimization followed by a forward dynamic launch simulation of SpaceX Starship, showing how a basic PID attitude control loop maintains stability against realistic wind, combustion and engine vibration disturbances from pad to LEO.
View full simulationTyre Rolling Resistance Modelling
A first-principles rolling resistance model for pneumatic bicycle tyres using Maxwell viscoelasticity, Persson's contact theory and quarter-car dynamics, deriving a closed-form expression for rolling resistance coefficient in terms of tyre width, pressure, load and road roughness.
View full simulationWatts the Difference: Cycling Performance Calculator
A physics-based web calculator that quantifies the speed and watt impact of common marginal gains in cycling — from body weight and position to tyre pressure, chainring size and atmospheric conditions — built with ex-pro cyclist Viktor Verschaeve.
View full simulationClassified PowerShift: Full Drivetrain Efficiency Analysis
Full drivetrain power-loss model for the Classified PowerShift system, combining chain articulation, bearing, and hub losses to quantify when the chainring-size advantages of the 1x configuration compensate for the hub's reduction-ratio efficiency penalty — validated against hub-level and complete drivetrain test rigs.
View full simulationInside the Classified PowerShift Hub
Physics-based simulation and test-rig validation of the Classified PowerShift two-speed planetary hub, demonstrating how a compact rear hub can deliver the gear range of a front derailleur while sustaining efficiency above 99% across the full operating range.
View full simulationBodyweight and Cycling Performance
First-principles analysis of where extra bodyweight helps and where it hurts cycling performance, deriving the gradient-duration boundary that separates power-favoring from power-to-weight-favoring terrain from first principles.
View full simulation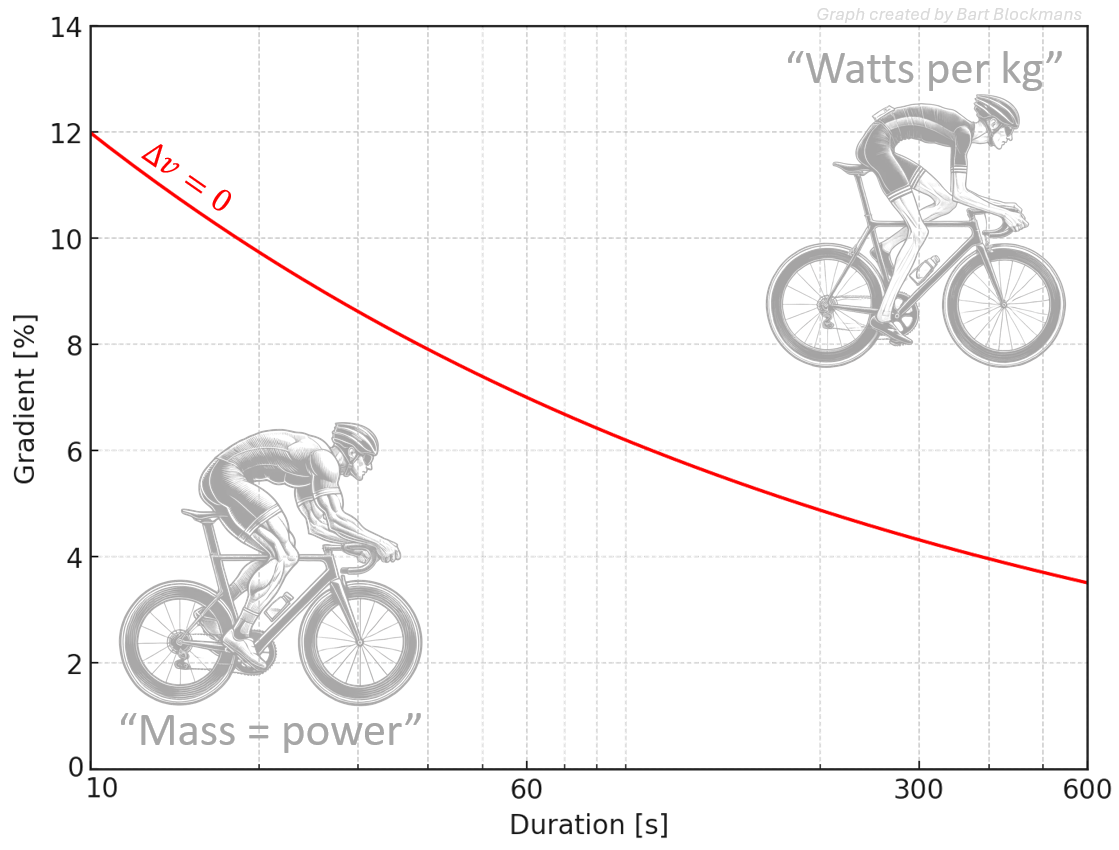
Wind and Elevation Effects on Cycling Speed
First-principles analysis of how headwind and hilly terrain reduce a cyclist's average speed on a loop, showing that optimal pacing reduces the penalty but cannot eliminate it, with the penalty factor scaling with wind speed squared and average gradient squared respectively.
View full simulation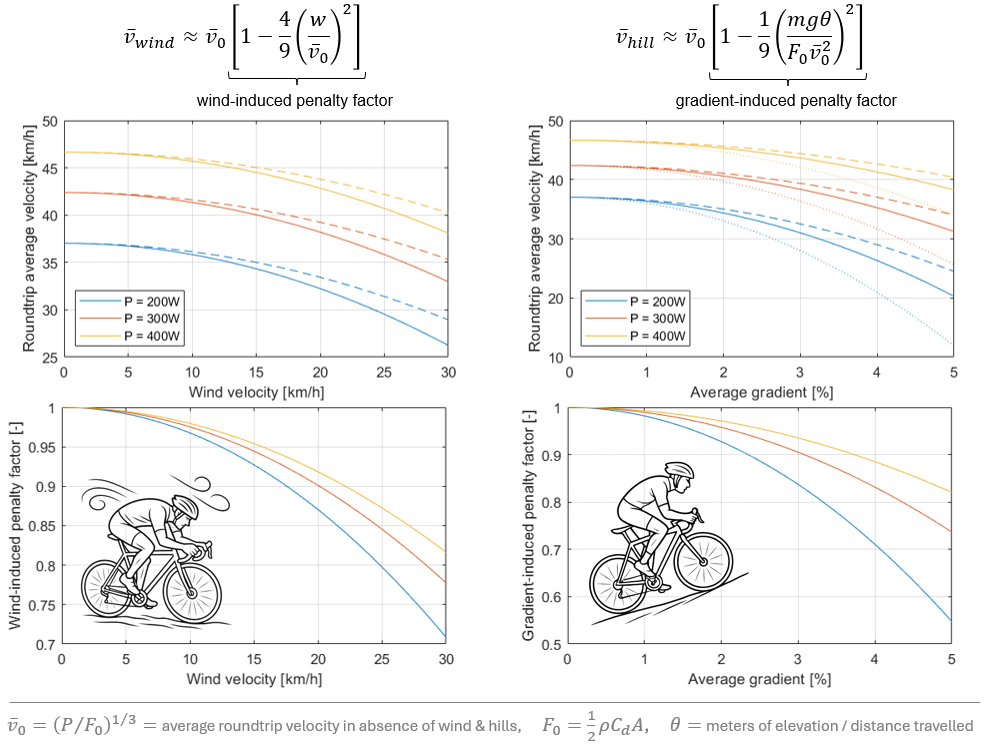
Drivetrain Efficiency Measurement Error Analysis
A rigorous error analysis of in-field bicycle drivetrain efficiency measurements using commercial power meters and timing equipment, establishing the minimum conditions under which such measurements are statistically meaningful.
View full simulation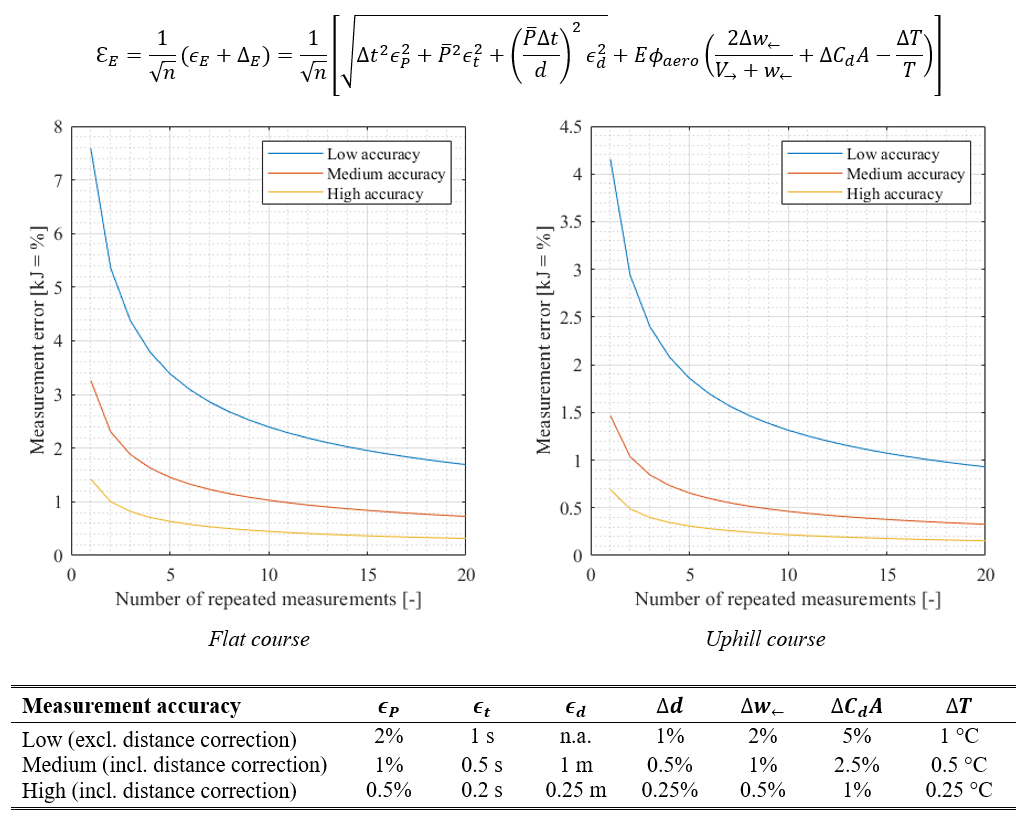
Matlab, Python and Julia: Scientific Computing Benchmark
A two-kernel benchmark comparing Matlab, Python, Julia, Fortran and C on a memory-bound LBM fluid simulation and a compute-bound N-body galaxy collision, finding Julia runs 4–5 times faster than Matlab or Python on compute-heavy kernels.
View full simulationHuman Power Across Sports
Back-of-envelope power calculations across competitive sports from sprinting to weightlifting, assembled into a power-versus-duration graph that quantifies where human performance boundaries are being set and where records are most likely to fall next.
View full simulation
PowerShift Hub Efficiency Analysis
Physics-based modelling and test-rig validation of the Classified PowerShift hub's mechanical efficiency, showing that a well-designed two-speed planetary drivetrain can match conventional high-end bicycle drivetrains while enabling performance gains further up the drivetrain.
View full simulation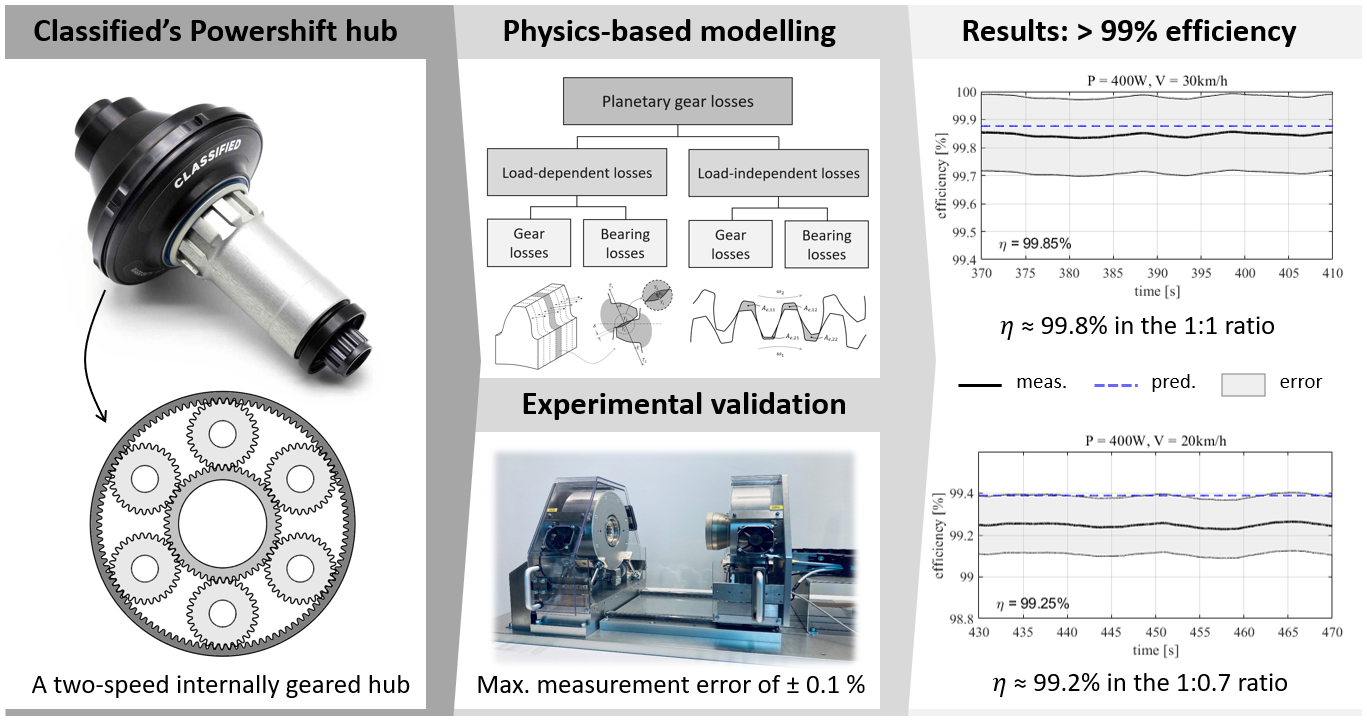
Mercator Telescope Mirror FEA
Finite element analysis of the 1.2 m Zerodur primary mirror of the Mercator telescope on La Palma, translating gravitational deformations at different inclination angles into optical aberrations using Zernike polynomials to assess image quality.
View full simulation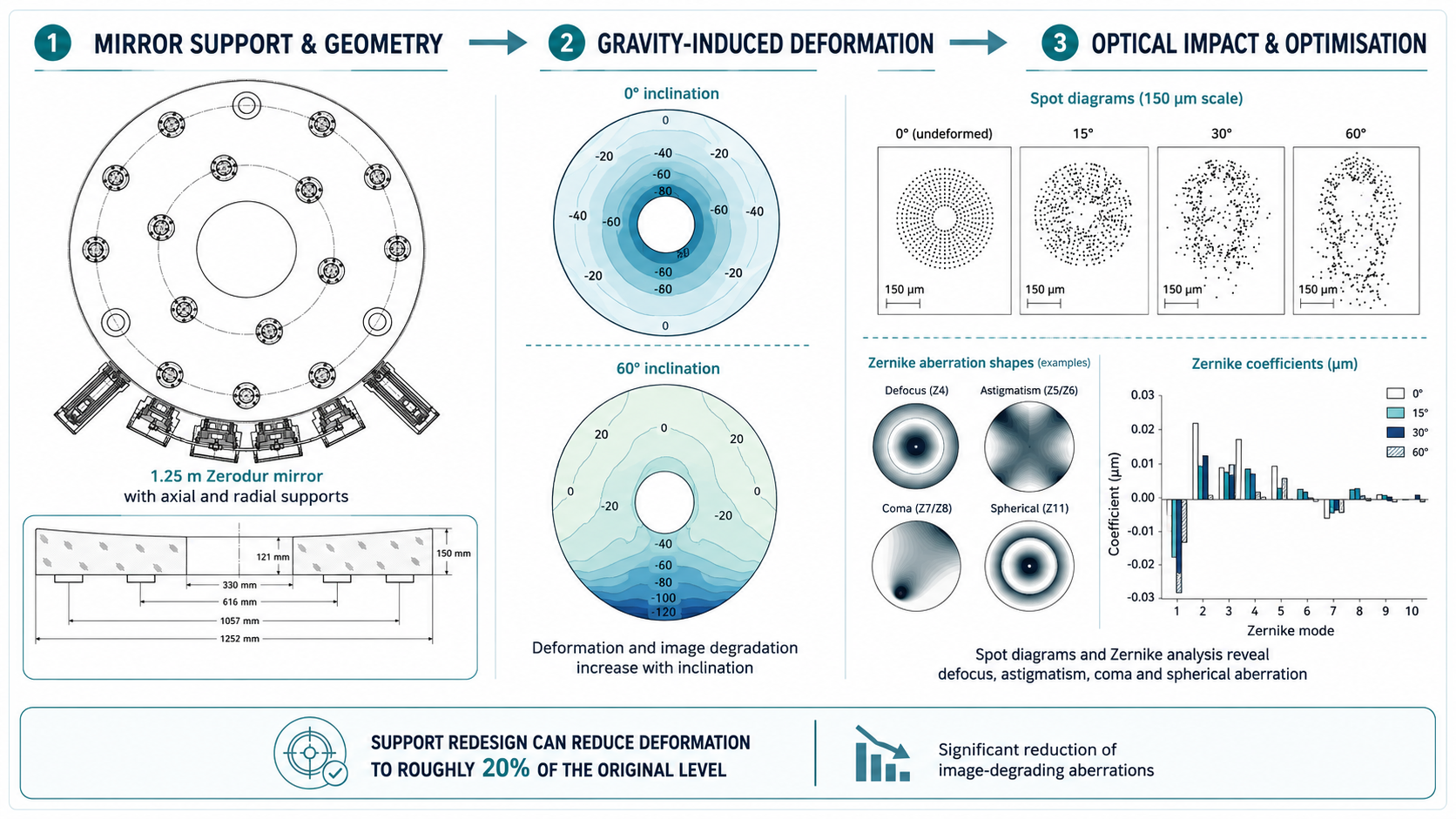
Multi-physics Wind Turbine Drivetrain Simulation
Coupled time-domain simulation framework for a multi-megawatt wind turbine drivetrain, connecting flexible multibody rotor and planetary gearbox models with aerodynamic loading, doubly-fed induction generator dynamics and control logic to study how transient events — wind gusts, voltage dips and emergency braking — propagate into local gear mesh and bearing loads.
View full simulation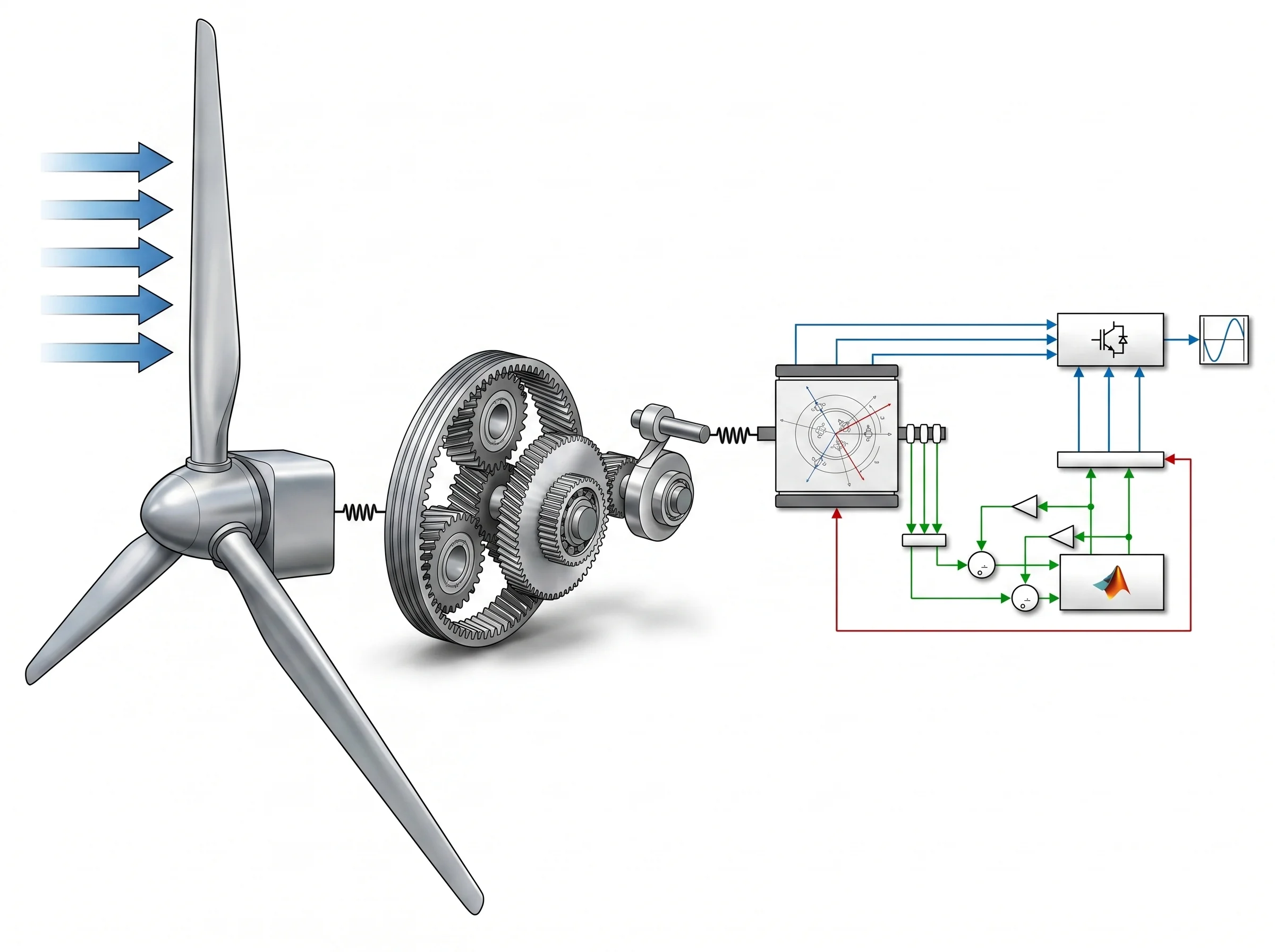
Classified Drivetrain at the World Championship
Drivetrain configuration analysis for competitive cycling time trials, including the mountain time trial of the Tour de France and the UCI World Championship time trial in Rwanda, examining the performance influence of hub gear ratio selection under race-realistic conditions.
View full simulation